RTOS in embedded
Bare metal
int main(void)
{
system_init();
while (1)
{
read_sensor(); // ~2 ms
process_data(); // ~4 ms
send_message(); // ~3 ms
blink_led(); // ~1 ms
}
}
What Actually Happens
|--- read ---|--- process ---|--- send ---|--- blink ---|
<------------------- ~10 ms ----------------------------->
Timing is assumed, not guaranteed
- If send_message() blocks → everything blocks
- Hard to add:
Logging
Diagnostics
Networking
- No task isolation
FreeRTOS Implementaiton
Task Definitions
Sensor Task (10 ms)
void sensor_task(void *arg)
{
TickType_t last = xTaskGetTickCount();
while (1)
{
read_sensor();
xQueueSend(sensor_queue, &data, 0);
vTaskDelayUntil(&last, pdMS_TO_TICKS(10));
}
}
Processing Task
void processing_task(void *arg)
{
while (1)
{
xQueueReceive(sensor_queue, &data, portMAX_DELAY);
process_data();
xQueueSend(tx_queue, &result, 0);
}
}
Communication Task
void comm_task(void *arg)
{
while (1)
{
xQueueReceive(tx_queue, &result, portMAX_DELAY);
send_message();
}
}
Heartbeat Task
void heartbeat_task(void *arg)
{
while (1)
{
toggle_led();
vTaskDelay(pdMS_TO_TICKS(500));
}
}
System Behavior (RTOS)
| Sensor Task : | read | wait | read | wait |
| Processing Task : | process | wait | ||
| Comm Task : | send | |||
| Heartbeat : | —- blink —- |
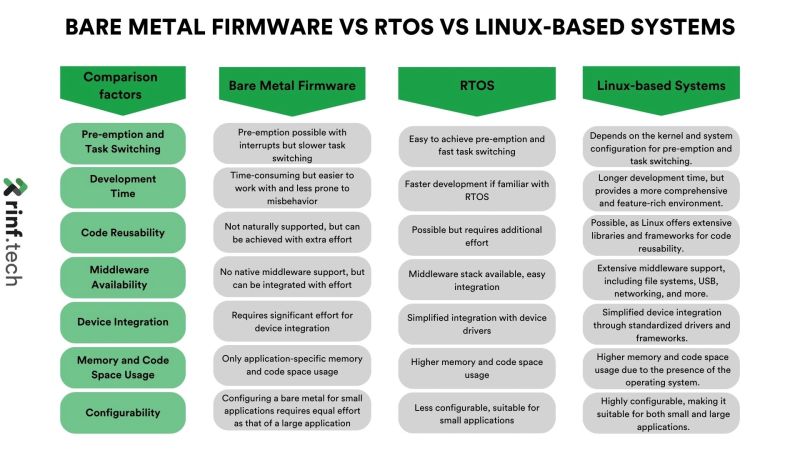
| Aspect | Bare-Metal | FreeRTOS |
|---|---|---|
| Timing | Implicit | Explicit |
| Blocking | Global failure | Local |
| Scaling | Painful | Structured |
| Debugging | Guesswork | Traceable |
| Safety | Weak | Stronger |